top of page
Optimal Transition of FWMAVs from Hovering to Forward Flight
NSF Project - CMMI-1435484
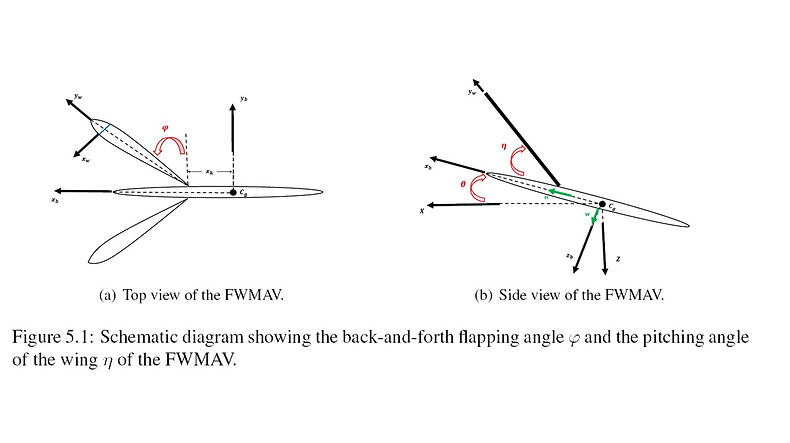
In this project, we formulate a minimum-time optimal control problem to steer a FWMAV dynamical system from a hovering condition to forward flight with a prescribed forward speed using time-periodic and averaged dynamics formulations. For the averaged dynamics representation, we optimize the back and forth flapping angle and the up and down-stroke angles of attack of the wing. We represent the flapping angle via a generic periodic function with some parameters that determine the waveform of the flapping angle over the cycle. We formulate the optimal control problem such that the cost functional is the final time, and the slowly time-varying parameters of the flapping angle wave form and the up and down-stroke angles of attack are considered inputs to the averaged dynamics. On the other hand, the instantaneous the flapping speed and wing pitching angle are considered direct inputs to the time periodic system. The problem is then to steer the averaged dynamics from the hovering fixed point (origin) to a prescribed average forward speed, and the time periodic dynamics from the hovering periodic orbit to the orbit of the forward flight condition. We show that the averaging is not suitable for the steering between hovering and forward flight and that time-periodic dynamics are required for the controller to achieve proper transition. Some of the results are documented in this paper and the rest is in a manuscript under-review.
bottom of page