top of page
Stable, Planar Self Propulsion Using a Hinged Flap
NSF Project - CMMI-1635143
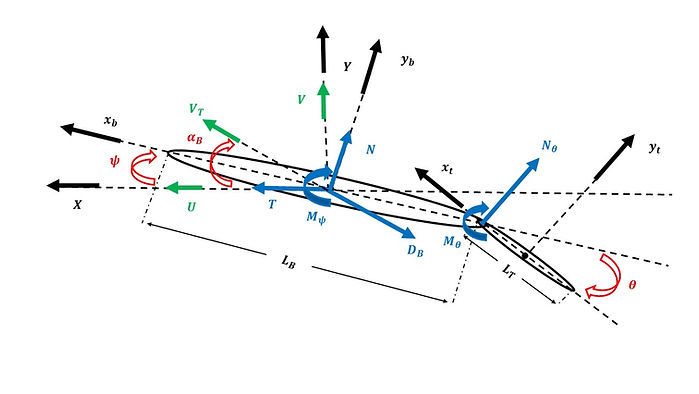
In this project, we developed a coupled dynamic model for the motion of a simple two-body propulsion device comprising a forebody and a servo-actuated tail that is based on the geometry of the saithe or pollock. The unsteady loads were based on Theodorsen’s unsteady lifting theory for sinusoidal flapping and were tailored for their application within the framework of the body motion. The simulation results show variations of the body variables that are within the same range of measured values for a speed of 1.2 m/s in water. Stability analysis performed using Floquet thoery shows that the system is stable if the center of mass is ahead of the mid-point of the body and tail. If this is not the case, the system become unstable. Future research will be performed to expand the ranges of considered speeds and stability parameters in addition to conducting a few experiments using a prototype for the two-body system. The results are documented in this paper.
bottom of page